![在2D平面上飞舞的蛇-受蛇启发的搜索和救援机器人[视频]](http://www.eastinstrument.com/uploadfile/2021/0601/202177301.jpg)
在2D平面上飞舞的蛇-受蛇启发的搜索和救援机器人[视频]
约翰·霍普金斯大学(Johns Hopkins University)的地形动力学实验室(Terradynamics Lab)创造了这个蛇形机器人来模仿动物。
蛇生活在从难以忍受的热沙漠到郁郁葱葱的热带森林等朴实的环境中,它们每天都在树上砍伐树木,岩石和灌木丛。通过研究这些蛇的运动方式,约翰·霍普金斯大学的工程师们创造了一种能够灵活,稳定地爬大台阶的蛇机器人。
该小组的新发现发表在《实验生物学和皇家学会开放科学杂志》上,推动了搜索和救援机器人的创建,这些机器人可以成功地在险恶的地形上航行。
“我们希望这些令人毛骨悚然的生物从中获得灵感,因为它们已经非常擅长稳定地解决日常生活中的障碍。希望我们的机器人能够学习如何像蛇一样在表面上摆动和编织,”约翰·霍普金斯大学机械工程学助理教授,论文的高级作者陈力说。
李说,以前的研究主要观察到蛇在平坦表面上的运动,但是很少在3D地形中在树上运动,并且没有考虑到现实生活中的大型障碍物,例如瓦砾和碎屑,搜救机器人将不得不越过这些障碍物。 。
李的团队首先研究了可变蛇王(这种蛇通常在沙漠和松橡树林中都可以发现)在李的Terradynamics实验室中是如何爬上台阶的。Li的实验室将机器人技术,生物学和物理学领域融合在一起,研究动物运动的技巧和窍门,以构建更多用途的机器人。
“这些蛇必须定期穿越巨石和倒下的树木;他们是运动的大师,我们可以从他们身上学到很多东西。”李说。
李和他的团队进行了一系列实验,改变了台阶的高度和台阶的表面摩擦力,以观察蛇对这些障碍的扭曲方式。
他们发现蛇将身体分成三部分:前后身体像波浪一样在水平台阶上来回摆动,而中体部分则保持僵硬,就这样徘徊,以架起大台阶。他们注意到,蠕动的部分提供了稳定性,可以防止蛇翻倒。
随着蛇越来越靠近台阶,三个身体部分沿着每个身体部分向下移动。随着越来越多的蛇到达台阶,其前身部分将变长,而后身部分将变短,而中身部分则保持大致相同的长度,垂直悬挂在两步之上。
如果台阶变得更高且更滑,则蛇会移动得更慢,并且前后晃动的次数更少,以保持稳定性。
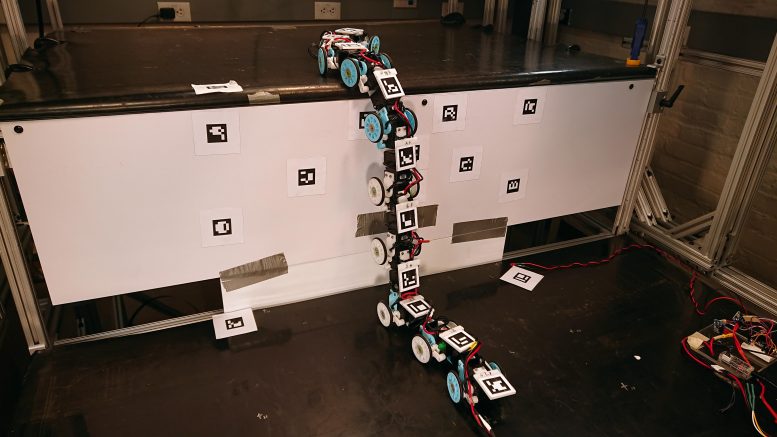
在分析了他们的视频并注意到蛇在实验室中是如何爬上台阶之后,李奇实验室的一名研究生傅启远创建了一个模仿动物运动的机器人。
起初,机器蛇难以在较大的台阶上保持稳定,并且经常会摆动,翻转或卡在台阶上。为了解决这些问题,研究人员将悬架系统(如您的汽车中的悬架系统)插入每个车身部分,以便在需要时可以压在表面上。此后,蛇形机器人的晃动程度降低了,变得更加稳定,爬升的步伐高达其身体长度的38%,成功率接近100%。
与其他研究中的蛇形机器人相比,李的蛇形机器人比除一个以外的所有蛇形机器人都更快,更稳定,甚至接近于模仿蛇的实际速度。但是,增加的车身悬架系统的缺点之一是机器人消耗了更多的电力。
“动物仍然优越得多,但是这些结果对于可以跨越较大障碍物的机器人领域是有希望的,”李补充说。
接下来,研究小组将针对蛇形机器人进行测试和改进,使其具有更复杂的3-D地形以及更多非结构化的大型障碍物。
参考:傅启远和陈力于2020年2月19日在《实验生物学和皇家学会开放科学》杂志上发表的论文《蛇穿越大型,光滑障碍物的机器人模型揭示了身体顺应性的稳定益处》。
10.1098 / rsos.191192
科学接口获得了Burroughs Wellcome基金职业奖,Arnold&Mabel Beckman基金会Beckman青年研究者奖和约翰·霍普金斯大学怀廷工程学院的启动资金,为这些研究提供了资金。
这两篇论文的其他作者包括约翰·霍普金斯大学的Sean W. Gart和Thomas W. Mitchel。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读


猜你喜欢
-
微观机器人,磁场远程驱动,使用毛细力将亚麻颗粒与位置
2022-03-30 -
DARPA地下自主机器人导航挑战
2022-03-27 -
显示机器人如何完成家务 - 自动化机器人只是通过观看学习
2022-03-27 -
蜘蛛侠式机械抓取器抵抗重力-秘密在于高速旋转水环
2022-03-24 -
美国陆军2019年十大科技进步[视频]
2022-03-22 -
革命性的“机器人铁匠”技术可以恢复美国制造业
2022-03-20 -
超轻型机器人昆虫使用柔软的人造肌肉来移动-幸存者被苍蝇拍夷为平地
2022-03-19 -
具有演绎推理的AI机器人可以在多人隐藏角色游戏中击败人类
2022-03-18 -
智能卫星在太空中修理和加油搁浅的卫星
2022-03-18 -
基于变形材料的微型机器人自主导航
2022-03-18 -
Pavlov软机器人:液晶聚合物学会移动和抓住物体
2022-03-16 -
双腿机器人在运行和跳跃时模仿人性平衡[视频]
2022-03-16 -
优化的设计和控制机器人,具有弹力,柔性的体
2022-03-14 -
“机器人酒店”发射到SpaceX Falcon 9 Rocket的国际空间站
2022-03-13 -
垃圾谈话伤害性能,即使它来自机器人
2022-03-12