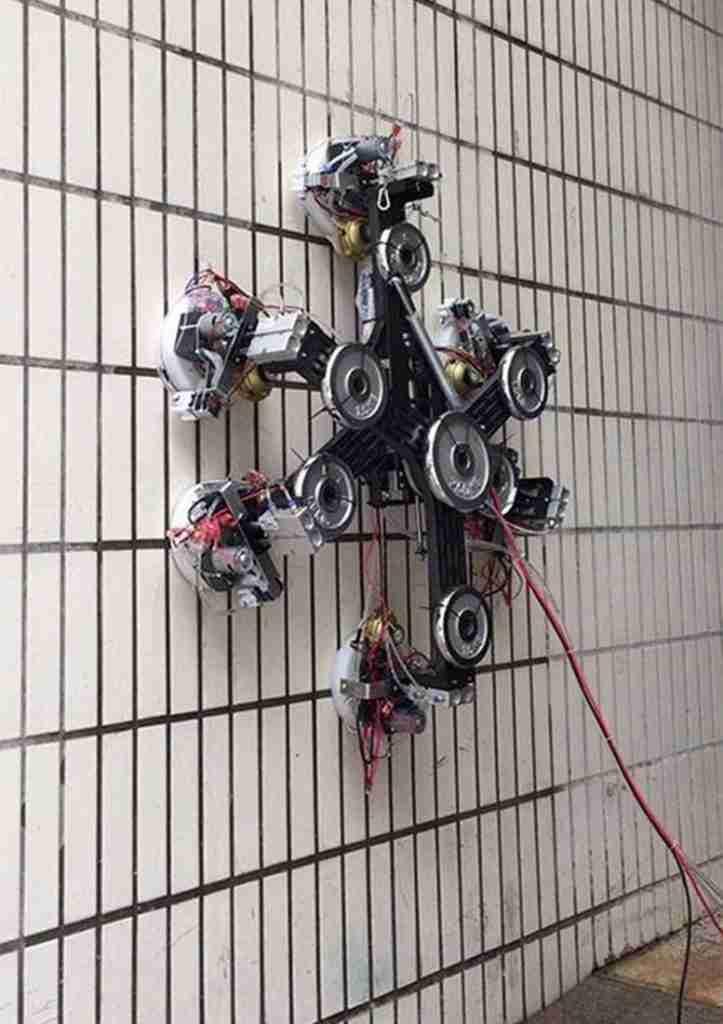
蜘蛛侠式机械抓取器抵抗重力-秘密在于高速旋转水环
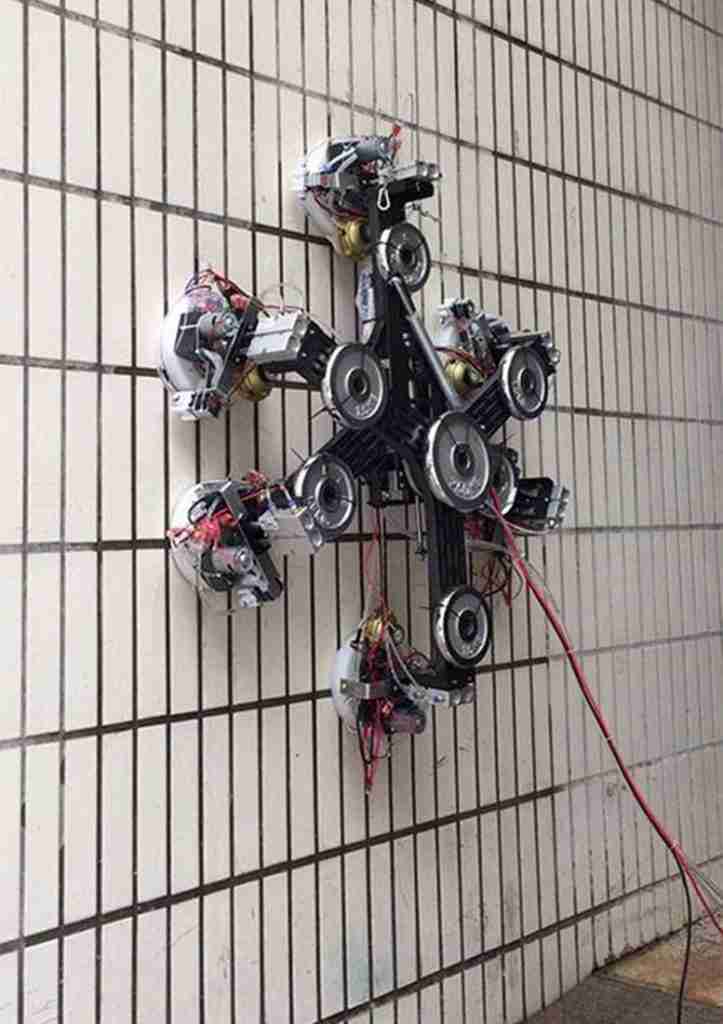
爬壁机器人使用零压力差方法形成吸力。
专门设计的真空吸尘器允许人类爬墙。科学家已经开发出一种吸力单元,无论其质地如何,都可以用在粗糙的表面上,并且可以用于开发具有抓地力的攀爬机器人和机械臂。
传统的真空抽吸方法和先前的真空抽吸装置由于真空泄漏而不能在粗糙表面上保持抽吸,这会导致抽吸失败。
研究人员Xin Li和Shi Kaige开发了一种零压差(ZPD)方法来增强真空抽吸装置的开发。他们的方法通过在表面和吸盘之间使用高速旋转水环来保持真空,从而克服了泄漏限制。他们在本周的AIP出版的《流体物理学》中讨论了他们的工作。
“我们的设计有很多应用,但我们认为爬壁机器人将是最有用的,”李说。“与其他攀岩机器人相比,具有基于ZPD的吸力单元的机器人在性能上实现了令人惊讶的改善。”
旋转水的离心力消除了真空区域边界处的压力差,从而防止了真空泄漏。它可以在吸盘内部保持较高的真空压力。
他们的ZPD吸尘器比传统吸尘器更节能,更小,更轻。研究人员用三种不同的吸力大小和应用对他们的装置进行了测试:在用于抓握和处理物体的机械臂上,在六脚爬壁机器人上以及作为类似蜘蛛侠的爬壁设备。
“这项研究的下一步是减少用水量。如果可以减少水的消耗,则吸水单元将在很少的水下工作很长时间,以便攀岩机器人可以携带自己的水,而不必连接到供水系统。”
参考:石凯歌和李新的“基于零压差法的真空抽吸装置”,2020年1月14日,流体物理学。DOI:
10.1063/1.5129958
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读




猜你喜欢
-
出生时的脂肪和胆固醇水平与5岁时的心理问题相关联
2022-03-23 -
美国陆军2019年十大科技进步[视频]
2022-03-22 -
在大学生中造成测试焦虑,孤独和降低动力的一个因素
2022-03-21 -
研究人员破解了牛顿的难以捉摸的'3身体'问题,这有几个世纪的科学家
2022-03-20 -
革命性的“机器人铁匠”技术可以恢复美国制造业
2022-03-20 -
超轻型机器人昆虫使用柔软的人造肌肉来移动-幸存者被苍蝇拍夷为平地
2022-03-19 -
科学家描述的71种新物种:从壁虎到妖精蜘蛛
2022-03-18 -
老年女性的低性动愿不仅仅是绝经
2022-03-18 -
如果妻子赚取超过40%的家庭收入,男人的压力会增加
2022-03-18 -
具有演绎推理的AI机器人可以在多人隐藏角色游戏中击败人类
2022-03-18 -
智能卫星在太空中修理和加油搁浅的卫星
2022-03-18 -
基于变形材料的微型机器人自主导航
2022-03-18 -
睡眠剥夺的危险影响比以前思想更糟糕
2022-03-17 -
Pavlov软机器人:液晶聚合物学会移动和抓住物体
2022-03-16 -
双腿机器人在运行和跳跃时模仿人性平衡[视频]
2022-03-16






![古老的星星突发在ESO望远镜的令人惊叹的新银河系图像中被发现[视频]](http://www.eastinstrument.com/uploadfile/2021/0601/202175319.jpg)