attn:美国宇航局的火星好奇风车司机需要你的帮助
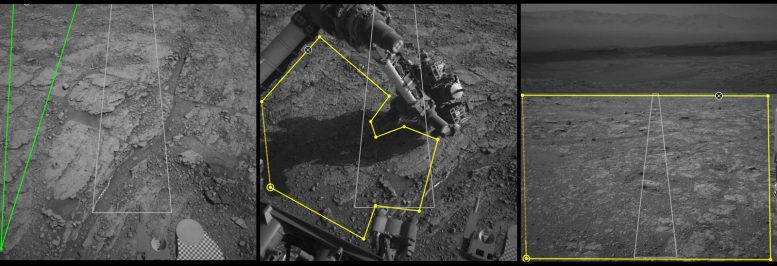
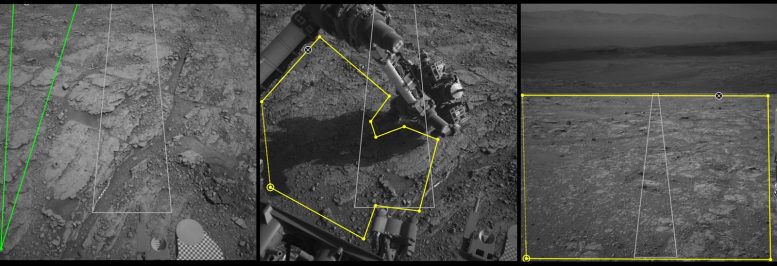
来自工具的三张图像,称为Ai4mars显示了美国宇航局的好奇罗孚所看到的不同种类的火星地形。通过绘制地形特征周围的边框并向他们分配四个标签之一,您可以帮助训练将自动识别奇妙的流动策划者的地形类型的算法。
使用在线工具来标记火星地形类型,您可以培训一个人工智能算法,可以改善工程师引导好奇石揽胜的方式。
您可以帮助美国航空航天局的好奇心搬家司机更好地导航火星。使用在线工具Ai4mars在从红色行星下载的图片中标记地形功能,您可以培训一个人工智能算法来自动读取景观。
那是左边的大岩石吗?它可以是沙吗?或者也许是漂亮的,平坦的基岩。托管在公民科学网站Zooniverse上的AI4MARS,让您在地形周围绘制边界,并选择四个标签之一。这些标签是锐化称为SPOC(土壤属性和对象分类)的火星地形分类算法的关键。
在NASA的喷气式推进实验室开发,该实验室已经管理了所有代理机构的火星火车站任务,SPOC标记各种地形类型,创建一个可视地图,帮助使命团队成员确定要采取的哪些路径。SPOC已经在使用中,但系统可以使用进一步的培训。
“通常,培训深入学习算法需要数以亿计的例子,”JPL AI研究员Hiro Ono说。“例如,自动驾驶汽车的算法培训,具有许多道路,标志,交通灯,行人和其他车辆的图像。深度学习的其他公共数据集包含人,动物和建筑物 - 但没有火星景观。“
美国宇航局的好奇心火星流动站的低角度自画像。
一旦完全达到速度,SPOC将能够自动区分粘性土壤,高岩石,平坦的基岩和危险沙丘,将图像发送到地球,这将使更容易计划奇妙的下一个移动。
“在未来,我们希望这种算法可以准确地做出其他有用的任务,例如预测流动车轮在不同表面上滑动的可能性有多大,”Ono说。
流动策划者的工作
JPL工程师称为Rover规划者可能会使来自更好训练的SPOC受益。他们对好奇的各个举动负责,无论是采取自拍照,将粉碎的样品滴入罗孚的身体,待分析(下面的视频),或从一个地方驾驶到下一个地方。
美国宇航局的好奇程度罗弗用各种仪器分析了它的第一个MARS样品,包括MARS(SAM)仪表套件的样品分析。在美国国家航空航天局的戈德轿车的航天飞行中心开发,山姆,山姆是一个藏在好奇心罗孚内的便携式化学实验室。SAM检查样本的化学物质,它摄取,特别是与环境是否可以支持或能够支持生命的相关化学。
完成驱动器可能需要四到五个小时(现在几乎完成),需要多个人编写和审查数百行代码。该任务涉及与科学家合作广泛:地质学家评估了地形来预测奇妙的轮子是否可以滑倒,被锋利的岩石损坏或陷入困境,困扰着精神和机会群体。
规划者还考虑将ROVE在驱动器结束时指出的方式,因为它的高增益天线需要一个明确的地球视线以接收命令。他们试图在一个驱动器期间预测落在地形上的阴影,这会干扰好奇心如何确定距离。(ROVER使用称为视觉径管的技术,将相机图像与附近的地标进行比较。)
AI如何提供帮助
SPOC不会取代流动策划者的复杂,延时的工作。但它可以释放他们专注于他们工作的其他方面,比如与科学家讨论下一步学习的科学家。
“我们的工作是如何安全地获得特派团的科学,”斯蒂芬妮·奥伊亚,其中一位参与AI4MARS的JPL ROVER规划者之一。“自动生成地形标签会节省我们的时间并帮助我们更加富有成效。”
智慧算法的好处将延伸到美国宇航局下一个火星任务的规划者,这是今年夏天推出的坚持不懈的罗佛。但首先,需要标记图像的存档。到目前为止,已经向AI4MARS站点上传了超过8,000个好奇心的图像,为算法提供大量饲料。ONO希望将来从精神和机会添加图像。与此同时,JPL志愿者正在翻译该网站,以便说西班牙语,印地文,日语和其他几种语言的参与者也可以贡献。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读



猜你喜欢
-
NASA的火星直升机将成为另一个星球上的第一架飞机-这是它到达红色星球表面的方式
2022-04-24 -
机器学习有一个巨大的缺陷:它很容易
2022-04-24 -
NASA的InSight Lander展示了其机械臂-“ Mole”的下一步是什么
2022-04-23 -
NASA的独创性火星直升机:关于工程奇迹的六件事
2022-04-23 -
新算法可在短时间内协调数百个机器人之间的复杂行为
2022-04-22 -
人工智能如何透过镜面看到:镜子的另一面是不同的
2022-04-22 -
NASA的恒心火星探测器与卡纳维拉尔角的Atlas V Rocket相连
2022-04-22 -
行星光谱发生器:看到其他世界上的模拟日落万花筒
2022-04-22 -
美国宇航局的这种蒸汽动力跳跃机器人可以探索太阳系的冰冷卫星
2022-04-22 -
通过火星表达观看马斯的Korolev火山口令人惊叹的飞行
2022-04-22 -
在美国国家航空航天局的火星奇妙流浪者观看的马斯天空中看到地球和金星
2022-04-21 -
火星倒计时:发射NASA 2020恒心漫游者
2022-04-20 -
火星上的天气怎么样?电荷的尘埃风暴驱动火星氯循环
2022-04-19 -
为了寻找火星上的生命,NASA迈出了第一步,允许计算机决定如何告诉我们
2022-04-19 -
科学家远离火星发电机-“与我们的想法截然不同”
2022-04-19