麻省理工学院汇编机器人从小块制作大型结构 - 可以一天建立空间殖民地
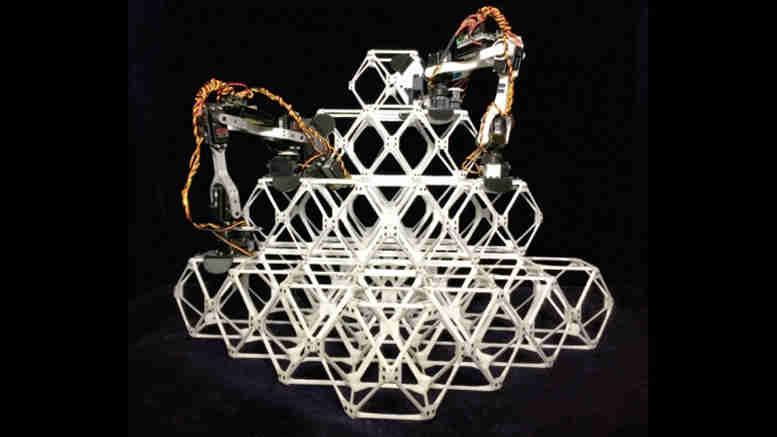
照片显示两个原型汇编机器人,在工作中放在一起,将一系列的小单位称为体素,进入更大的结构。
今天的商用飞机通常在一个工厂的不同位置制造的,往往在一个工厂的不同地点,另一个地方的机身部分,其他地方的尾部部件 - 然后在巨大的货运飞机中飞行到最终组装的巨大货厂。
但是,如果最终组装是唯一的装配,那么整个飞机都是由一系列微小相同的碎片建造,都是由一支小型机器人的军队汇集在一起?
这就是研究生Benjamin Jenett,与MIT Bershenfeld教授(MIT Bits Atoms(CBA)的教授(CBA)合作的愿景一直在追求他的博士论文工作。现在已经达到了这样的机器人的原型版本可以组装小型结构,甚至作为团队组装的小型结构,以建立更大的装配。
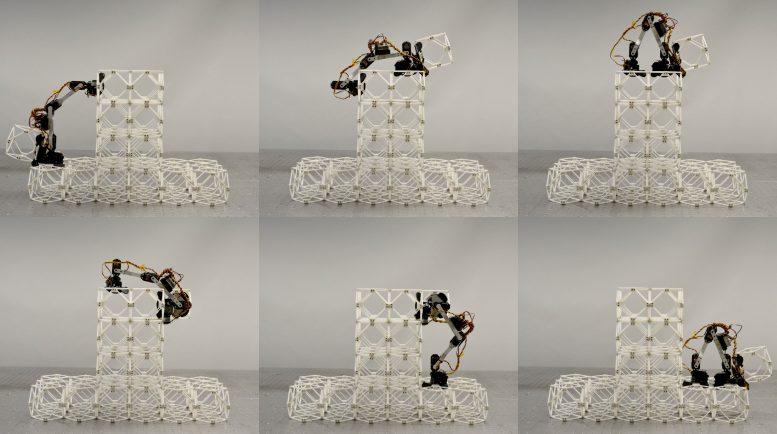
照片序列显示了工作中的装配机器机器人,在正在构造的结构的顶部和向下携带一个结构单元。
新的工作出现在10月份的IEEE机器人和自动化信件中,jenett,gershenfeld,研究生Amira Abdel-Rahman和CBA校友Kenneth Cheung Sm '07,Phd'12,博士们在美国宇航局Ames Research Center,他领导Armadas项目设计一个可以用机器人组装建造的月球基础。
“本文是一种享受,”休斯顿大学电脑工程副教授的Aaron Becker说,他与这项工作无关。“它将顶部缺口机械设计与钳口放下演示,新的机器人硬件和一个超过100,000元素的模拟套件相结合,”他说。
“这是什么在这是一种新的机器人,我们称之为机器人,”Gershenfeld说。历史上,他解释说,有两种广泛类别的机器人学 - 由昂贵的定制组件制成,专注于特殊应用,如工厂组装,由廉价的大规模生产模块制成的性能较低。然而,新机器人是两者的替代品。它们比前者更简单,而比后者更有能力,他们有可能彻底改变大规模系统的生产,从飞机到整个建筑物的桥梁。
根据Gershenfeld的说法,关键差异在于机器人装置与其处理和操纵的材料之间的关系。通过这些新的机器人,“你不能将机器人与结构分开 - 它们作为一个系统一起工作,”他说。例如,虽然大多数移动机器人需要高精度的导航系统来跟踪其位置,但新的汇编机器人只需要跟踪它们与叫体素的小亚基相对的位置,它们目前正在进行中。每当机器人踩到下一个体素上时,它会重新调整它的位置感,始终与目前所在的特定组件相关。
潜在的潜视是,正如屏幕上的像素阵列一样,可以通过在屏幕上使用阵列来再现图像的最复杂,几乎可以重新创建任何物理对象,作为较小的三维部分的阵列,或者可以自己制作简单的struts和节点。该团队已表明,这些简单的组件可以安排有效地分配负载;它们在很大程度上由开放空间组成,使得结构的总重量最小化。单位可以通过简单的汇编器拾取并彼此相邻地放置在彼此相邻的位置,然后使用内置在每个体素中的锁定系统一起固定在一起。
机器人本身类似于小臂,具有两个长区段,其在中间铰接,并且用于夹持在每一端的体素结构上的装置。简单的装置通过重复打开和关闭它们的V形物体,沿着一排体素前进,从一行沿一排体素前进以从一个到下一个移动。Jenett称该小型机器人Bill-E(Nod到电影机器人Wall-E)代表了BipeDal各向同性格局机车探险家。

原型汇编机器人的动画在工作。
jenett已建立了多个版本的汇编器作为概念验证设计,以及相应的体素设计,具有锁定机构,可以从其邻居容易地附加或分离每个锁定机构。他使用这些原型来证明块的组装成线性,二维和三维结构。“我们没有把精确度放在机器人中;珍妮特说,精度来自结构“随着它逐渐形成。“这与所有其他机器人不同。它只需要知道它的下一步是。“
由于CBA总监Gershenfeld表示,它在组装碎片上,每个微小的机器人都可以计算其在结构上的步骤。随着导航,这让机器人在每个步骤中正确的错误,从而消除了典型机器人系统的大部分复杂性。“它缺少大部分通常的控制系统,但只要它不会错过一步,它就会知道它的位置。”对于实际组装应用,这种单位的群体可以共同努力加速该过程,感谢由Abdel-Rahman开发的控制软件,可以让机器人协调他们的工作并避免彼此的方式。
这种大型结构的组装来自相同的亚基使用简单的机器人系统,就像一个组装乐高街区的一个小城堡的孩子,已经吸引了一些主要潜在用户的兴趣,包括美国宇航局,麻省理工学院在这项研究中的合作者,以及欧洲航空航天公司空中客车SE,也有助于赞助这项研究。
这种组件的一个优点是可以通过与初始组装相同的机器人工艺容易地处理维修和维护。可以从结构中拆卸损坏的部分并用新的结构替换,产生与原件一样强大的结构。“无建筑物与建筑一样重要,”Gershenfeld说,这个过程也可用于随着时间的推移对系统进行修改或改进。
“对于一个空间站或农历栖息地,这些机器人将居住在结构上,不断保持和修复它,”珍妮说。
Gershenfeld说,最终,这些系统可用于构建整个建筑物,尤其是在困难的环境中,尤其是在空间或月球或火星上的环境中。这可以消除从地球一直运输大型预购结构的需要。相反,可以使用可以在其最终目的点释放出这些亚基的系统来发送大量的微小亚基 - 或从本地材料形成它们。“如果你可以制作一个巨大的喷气式飞机,你可以制作建筑物,”Gershenfeld说。
在德国没有参与这项工作的德国技术大学的操作系统和计算机网络主任桑德飞行员,说:“超级化,数字材料如[这些]开放了构建高效,复杂的令人惊叹的观点,大规模结构,在航空航天应用中至关重要。“
但是,费尔特表示,组装这种系统是一项挑战,他计划加入研究团队以进一步发展控制系统。“这是使用小型和简单的机器人的使用,以提供下一个突破:机器人不会疲倦或无聊,并且使用许多微型机器人似乎是获得这项关键工作的唯一方法。Ben Jennet和合作者的这种极其原创和聪明的工作使得巨大的飞跃朝着动态可调节的飞机翅膀,巨大的太阳风帆甚至可重新配置的空间栖息地建造了巨大的跃迁。“
在这个过程中,Gershenfeld说:“我们觉得我们正在发现混合材料机器人系统的新领域。”
参考:Benjamin Jenett,Amira Abdel-Rahman,Kenneth Cheung和Neil Gershenfeld,2019年7月23日,IEEE机器人和自动化字母。
10.1109 / LRA.2019.2930486.
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读



猜你喜欢
-
哈勃太空望远镜发现的熟悉景象
2022-03-07 -
首次以高分辨率揭示了最致命的农作物杀伤病毒
2022-03-06 -
将硼丁烯和石墨烯集成到未来电子产品的2D异质结构中
2022-03-06 -
自主机器人船改善了海上环境采样
2022-03-06 -
蜘蛛和蚂蚁激发了金属所以防水,它不会下沉[视频]
2022-03-05 -
NASA为土星卫星设计先进的变形机器人[视频]
2022-03-02 -
记录破碎观察链接到暗物质到银河系
2022-03-02 -
使用超级计算机和中子来揭示本质无序蛋白质的结构
2022-03-02 -
像疱疹和Zika这样的病毒需要重新分类,这就是为什么
2022-03-01 -
'Tunabot'揭开 - 第一个机器人鱼,以跟上金枪鱼[视频]
2022-02-28 -
超越GPS:毫米尺度位置跟踪
2022-02-28 -
演变为更好的模仿人类的机器人 - 可能在2020年选举中努力检测
2022-02-27 -
难以钻石?科学家预测的43种新形式的超硬碳。
2022-02-26 -
安全捕获新的超软机器人夹具水母[视频]
2022-02-26 -
几何到病毒:数学用于解决病毒难题
2022-02-26