工程师开发可在微重力下跳来跳去的“刺猬”机器人

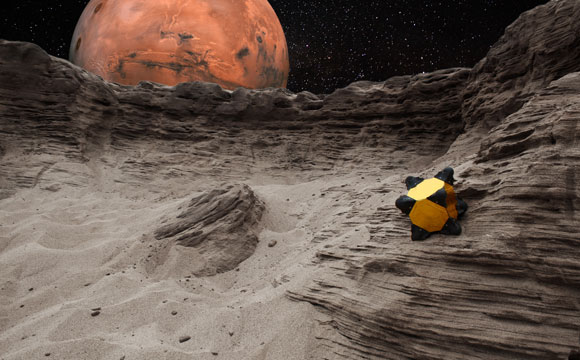
尽管火星漫游车不能上下颠倒运行,但无论哪一侧着陆,刺猬机器人都可以正常工作。学分:NASA / JPL-Caltech /斯坦福大学
来自NASA,麻省理工学院和斯坦福大学的工程师正在开发“刺猬”机器人,该机器人专门设计用于克服通过跳跃和翻滚在微重力中横穿小物体的挑战。
跳跃,翻滚和翻转不是您期望航天器探索其他世界的典型动作。例如,传统的火星漫游车在轮子上滚动,它们无法上下颠倒运行。但是在小物体上,例如小行星或彗星,低重力条件和粗糙的表面使传统驾驶更加危险。
Enter Hedgehog(刺猬):这是机器人的新概念,专门设计用于克服穿越小物体的挑战。该项目是由位于美国加利福尼亚州帕萨迪纳市的NASA喷气推进实验室的研究人员联合开发的。加利福尼亚州斯坦福市的斯坦福大学;以及位于剑桥的麻省理工学院。
刺猬是一种与众不同的机器人,它会在表面跳动和翻滚而不是在轮子上滚动。JPL小组负责人Issa Nesnas说:“它的形状像一个立方体,无论它落在哪一边都可以操作。”
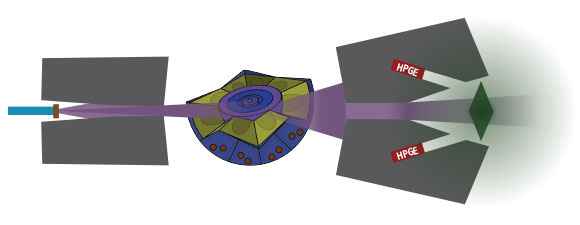
基本概念是带有尖峰的立方体,该立方体通过旋转和制动内部飞轮而移动。峰值保护机器人的身体不受地形影响,并在跳跃和翻滚时充当脚。
名为“刺猬”的机器人概念可以通过在彗星和小行星上跳跃和滚动来探索它们的微重力环境。在“呕吐彗星”抛物线飞行的微重力环境中,查看刺猬的动作。
纳斯纳斯说:“尖峰也可以容纳诸如热探针之类的仪器,以在机器人翻滚时获取表面温度。”
2015年6月,在美国国家航空航天局(NASA)的C-9飞机上对两架刺猬的原型机(其中一架来自斯坦福大学,另一架来自JPL)进行了微重力研究。在180次抛物线飞行过程中,这些机器人在四次飞行过程中展示了多种类型的演习,这些演习对于在重力减轻的小型车身上行驶非常有用。研究人员在模仿各种表面的不同材料上测试了这些动作:沙质,粗糙和岩石,滑溜和冰冷,柔软和易碎。
JPL项目首席工程师罗伯特·里德(Robert Reid)表示:“我们首次展示了刺猬原型在类似彗星的环境中执行受控的跳跃和翻滚。”
刺猬最简单的动作是“偏航”或转弯。在将自己指向正确的方向后,刺猬可以使用一个或两个尖刺跳远距离,也可以通过从一个面旋转到另一个面滚动近距离。刺猬通常会向目标感兴趣地跳较大的啤酒花,然后随着距离的临近而出现较小的跌落。
在抛物线飞行的一项实验中,研究人员证实,刺猬还可以执行“龙卷风”机动,在这种机动中,机器人会主动旋转以从水面发射自己。该操作可用于逃脱沙坑或其他可能会卡住机器人的情况。
JPL刺猬原型具有八个尖刺和三个飞轮。它本身重约11磅(5千克),但研究人员预想,使用照相机和光谱仪等仪器,它的重量可能超过20磅(9千克)。斯坦福(Stanford)原型更小,更轻,峰值更短。
这两个原型机都通过使用电动机和制动器旋转和停止三个内部飞轮来进行机动。两个原型之间的制动机制有所不同。JPL的版本使用盘式制动器,而Stanford的原型使用摩擦带使飞轮突然停止。

旨在探索彗星和小行星表面的刺猬机器人可以执行“龙卷风”操作,以自转并从表面发射出去。学分:NASA / JPL-Caltech /斯坦福大学
“通过控制飞轮的制动方式,您可以调整刺猬的跳跃角度。当时的想法是测试这两种制动系统,并了解它们的优缺点。”斯坦福大学车队负责人马可·帕沃内(Marco Pavone)说,他最初是在2011年与奈斯纳斯(Nesnas)提出刺猬的。
“刺猬尖刺的几何形状对其跳跃轨迹有很大影响。我们对几种尖峰配置进行了实验,发现立方体形状提供了最佳的跳频性能。立方体结构也更容易在航天器中制造和包装,”斯坦福大学项目首席工程师本杰明·霍克曼(Benjamin Hockman)说。
研究人员目前正在研究刺猬的自主性,试图增加机器人在没有地球指示的情况下自己可以做的事情。他们的想法是,轨道母舰会在机器人之间来回传递信号,这类似于NASA的火星漫游者的好奇心和机会通过围绕火星的卫星进行通信的方式。母舰还可以帮助机器人导航并确定其位置。
研究人员说,与传统的漫游车相比,刺猬机器人的建造成本相对较低,并且可以将其中的几个包装在一起进行飞行。母舰可以一次或分阶段释放许多机器人,让它们散布开来,以发现一个从未有过的世界。
刺猬目前正在通过NASA创新先进概念(NIAC)计划进行第二阶段开发,由Pavone领导。由Nesnas牵头的NASA中心创新基金(CIF)和NASA的飞行机会计划(FOP)支持了飞行开发和测试。NIAC,CIF和FOP是位于美国国家航空航天局(NASA)华盛顿总部的太空技术任务部的计划。JPL由加州理工学院(NASA)负责管理。斯坦福大学,麻省理工学院和JPL合作开展该项目。
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读
猜你喜欢
-
哈佛工程师打造3D打印自主机器人
2021-11-01 -
“风机器人” –行星天空的未来探索者?
2021-10-27 -
工程师设计可打印的厘米级折纸机器人
2021-10-25 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
工程师开发微调触手,所以微小的机器人可以处理精致的物体
2021-10-20 -
新算法可让机器人自主计划任务
2021-10-17 -
修饰的RNA延长了人类细胞中的端粒,逆转了衰老的时钟
2021-10-16 -
新型“串联”太阳能电池可利用更多阳光
2021-10-12 -
麻省理工学院工程师开发用于港口安全的水下机器人
2021-10-07 -
无法被电动机器人猎豹在草丛中跑步
2021-10-04 -
斯坦福工程师改善柔性碳纳米管电路
2021-09-24 -
斯坦福工程师改善柔性碳纳米管电路
2021-09-24 -
可打印的机器人在加热时自组装
2021-09-22 -
工程师开发了可以感知玩家情绪的视频游戏控制器
2021-09-22