麻省理工学院工程师设计透明,基于凝胶的机器人
来自麻省理工学院的工程师团队开发出透明,凝胶的机器人,可以有一天有助于手术操作和逃避水下检测。
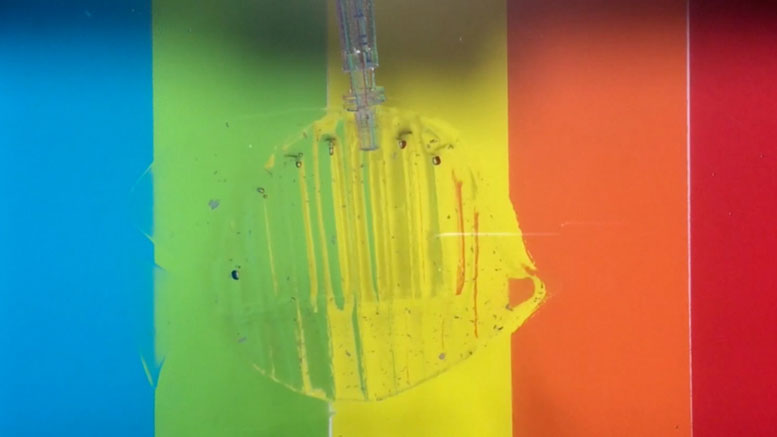
麻省理工学院的工程师已经制造了透明的凝胶的机器人,当水泵入和流出时移动。机器人可以执行许多快速,有力的任务,包括在水下踢球,并抓住和释放活鱼。
机器人完全由水凝胶制成 - 一种坚韧的橡胶状,几乎透明的材料,主要由水组成。每个机器人都是中空,精确设计的水凝胶结构的组合,连接到橡胶状管。当研究人员将水泵进入水凝胶机器人时,结构迅速以使机器人卷起或拉伸的方向膨胀。
该团队塑造了几个水凝机器机器人,包括前后襟翼的鳍状结构,这是一个铰接的伴奏,使踢动动作,以及可以挤压和放松的柔软,手形的机器人。
因为机器人几乎完全由水供电,所以它们对水有类似的视觉和声学性质。研究人员提出了这些机器人,如果为水下应用设计,可能几乎是不可见的。
麻省理工学院的工程师都制造了透明的凝胶机器人,可以执行一些快速,有力的任务,包括在水下踢球,并抓住和释放活鱼
该集团由宣河赵领导,麻省理工学院机械工程和民营和环境工程副教授,以及研究生Hyunwoo Yuk,目前正在寻求适应医疗应用的水凝胶机器人。
“水凝胶柔软,潮湿,生物相容性,可以与人体器官形成更友好的界面,”赵说。“我们正积极与医疗团体合作,将该系统转化为软凝胶等软机械师,如水凝胶'手,这可能会对手术作业中的组织和器官施加更温和的操纵。”
赵和佑本周刊在本周在自然通信期刊上发表了结果。他们的共同作者包括讲林和楚马,邮政编码的麻省理工学院大学生,博士·马迪·高手,以及机械工程尼古拉斯X.Fang副教授。
机器人配方
在过去的五年中,赵的小组一直在为水凝胶的“食谱”,聚合物和水的混合溶液,以及他们发明的技术,用于制造坚韧又高伸缩的材料。它们还开发了粘合这些水凝胶的方法,以玻璃,金属,陶瓷和橡胶如玻璃,金属,陶瓷和橡胶,从而产生极强的粘合抗蚀剂。
该团队意识到这种耐用,灵活,强核性水凝胶可能是用于软机器人的理想材料。许多团体已经设计了砂质橡胶的柔软机器人,但赵某指出这种材料不像水凝胶一样生物相容性。当水凝胶大多由水组成时,他说,它们自然地在生物医学环境中使用。虽然其他人试图用水凝胶外出时尚机器人,但它们的溶液导致脆弱,相对且抗弯的材料,其裂缝或爆裂重复使用。
相比之下,赵的团体发现其配方很好地瘦弱于软机器人。
“我们没有想到这种[软机器人]最初的项目,但实现了我们的专业知识对于将这些果冻翻译为强大的执行器和机器人结构来说至关重要,”尤克说。
快速而有力
为了将水凝胶材料应用于软机器人,研究人员首先看着动物世界。它们特别集中在瘦性,或玻璃鳗鱼 - 微小,透明,水凝胶状的鳗鱼幼虫,最终迁移到他们的天然河流栖息地。
“旅行是非常长的,没有保护的手段,”你说。“似乎他们试图作为一种有效的伪装策略进化成透明形式。我们希望达到类似的透明度,力量和速度。“
为此,Yuk和Zhao使用了3-D印刷和激光切割技术将它们的水凝胶配方打印成机器人结构和其他中空单元,它们粘合到连接到外部泵的小型橡胶管中。
为了致动或移动结构,团队使用注射器泵通过中空结构喷射水,使它们能够快速卷曲或拉伸,这取决于机器人的整体配置。
Yuk和Zhao发现,通过抽水,它们可以产生快速,有力的反应,使水凝胶机器人能够在一秒钟内产生几牛奶的力量。出于透视,其他研究人员通过简单的渗透激活了类似的水凝胶机器人,使水自然渗入结构 - 一种慢的过程,在几分钟或几小时内产生Millinewton力。
捕捉和释放
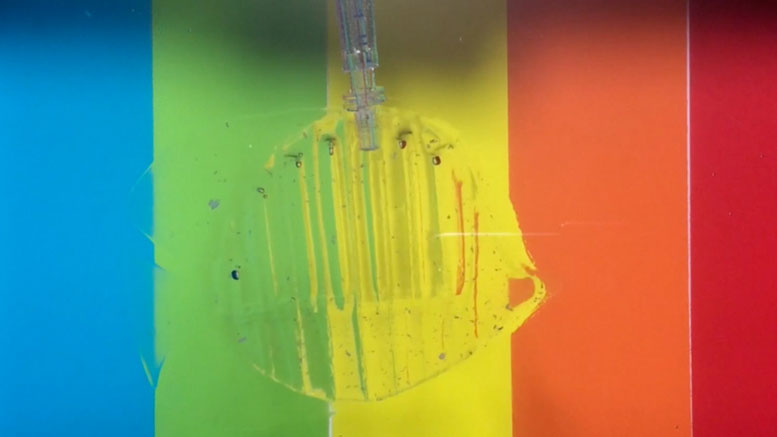
在使用多个水凝胶机器人设计的实验中,该团队发现该结构能够承受多达1,000个循环的重复使用而不会破裂或撕裂。他们还发现,每个设计都放在彩色背景上,几乎完全伪装。该组测量了水凝胶机器人的声学和光学性质,并发现它们几乎等于水,与软机器人中的橡胶和其他常用的材料不同。
在这项技术的惊人演示中,该团队制造了一款手形的机器人夹具和泵出水,进出其“手指”,使手打开并关闭。研究人员用金鱼淹没在坦克中的夹子,并显示出作为鱼类的过去,夹具强壮,足以靠近鱼。
“[机器人]几乎是透明的,很难看,”赵说。“当你释放鱼时,它很开心,因为[机器人]柔软,不会损坏鱼。想象一下,一个硬机器人手可能会挤上鱼。“
接下来,研究人员计划识别水凝胶机器人的特定应用,以及定制其对特定用途的食谱。例如,医疗应用可能不需要完全透明的结构,而其他应用可能需要机器人的某些部分比其他应用更硬。
“我们想确定现实的应用,并优化材料以实现有影响力的东西,”尤克说。“为了我们的最佳知识,这是水凝胶压力的第一次演示。我们现在正在将这一概念抛出作为一个敞开的问题,说,“让我们玩这个。”
这项研究部分受到海军研究所,MIT士兵纳米技术学院和国家科学基金会的支持。
出版物:Hyunwoo Yuk,等人,“液压水凝胶执行器和机器人在光学和超声伪装在水中,”自然通信8,物品编号:14230(2017); DOI:10.1038 / ncomms14230
郑重声明:文章仅代表原作者观点,不代表本站立场;如有侵权、违规,可直接反馈本站,我们将会作修改或删除处理。
相关阅读
猜你喜欢
-
麻省理工学院的科学家们开发了将有益细菌运送到胃肠道的新方法
2021-12-01 -
新的纳米粒子测试可以加快药物开发
2021-12-01 -
麻省理工学院研究表明地球上的复杂生活开始了23.3亿年前
2021-11-26 -
SEAS工程师3D打印第一个自主的完全软的机器人
2021-11-25 -
新方法识别与复杂疾病相关的遗传标志物
2021-11-25 -
科学家发现氨基酸为肿瘤细胞提供了大部分构成要素
2021-11-25 -
麻省理工学院化学家创造新的适应性金属笼凝胶
2021-11-24 -
量子过程显着提高了可以利用阳光利用的能量
2021-11-24 -
工程师正在开发机器人航天器以协助在轨卫星维修
2021-11-24 -
“数据科学机器”用算法代替了人类的直觉
2021-11-22 -
科学家克服了关键的Crispr-Cas9基因组编辑障碍
2021-11-22 -
神经科学分子发现可能与自闭症相关的行为状态基因
2021-11-21 -
神经科学分子发现可能与自闭症相关的行为状态基因
2021-11-21 -
神经科学分子发现可能与自闭症相关的行为状态基因
2021-11-21 -
神经科学分子发现可能与自闭症相关的行为状态基因
2021-11-21